

The sequence are organized in category. Each category contains a set of 4D sequences. Each sequence consists of :
- Calibration information for the multi-camera set up
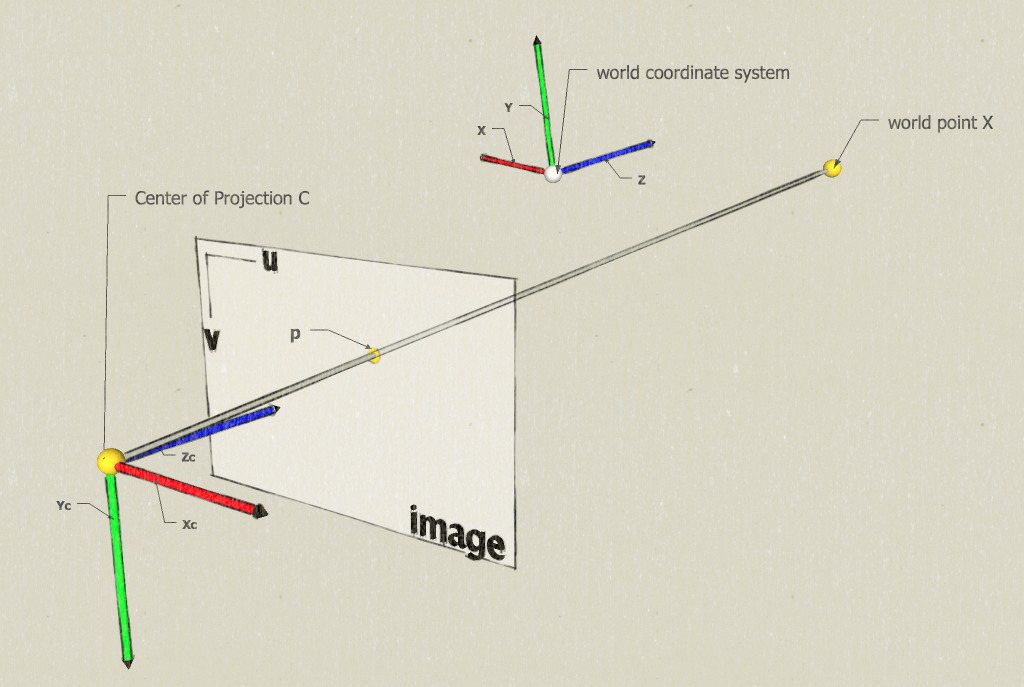
Camera calibrations are given in the form of 3×4 projection matrices M. A world point X=[x y z 1] projects into the image point p=[au av a] such that: p^t = M X^t (^t for transpose) with the camera and image coordinate frames as shown in the figure :
The file calib-n.4dc contains the projection matrices of all the cameras :
sequence_root/setup/calib-n.4dc
There is also one file by camera :
sequence_root/setup/cam00.txt sequence_root/setup/cam01.txt ... sequence_root/setup/camN.txt
- Images acquired from multiple cameras :
sequence_root/sequence_name/Pictures/cam-000/img_000000.png sequence_root/sequence_name/Pictures/cam-000/img_000001.png ... sequence_root/sequence_name/Pictures/cam-N/img_N.png
- Silhouettes extracted from these images by eliminating the background :
sequence_root/sequence_name/SilhouettesPictures/cam-000/silh_000000.png sequence_root/sequence_name/SilhouettesPictures/cam-000/silh_000001.png ... sequence_root/sequence_name/SilhouettesPictures/cam-N/silh_N.png
- Reconstructed mesh geometry at different time frames in the sequence :
sequence_root/sequence_name/Models/Off/model_000000.off sequence_root/sequence_name/Models/Off/model_000001.off ... sequence_root/sequence_name/Models/Off/model_N.off